OpenCV-Python-图像梯度与边缘检测,,一、图像梯度我们知道
OpenCV-Python-图像梯度与边缘检测,,一、图像梯度我们知道
一、图像梯度
我们知道一阶导数可以用来求极值。把图片想象成连续函数,因为边缘部分的像素值与旁边的像素明显有区别,所以对图片局部求极值,就可以得到整幅图片的边缘信息。不过图片是二维的离散函数,导数就变成了差分,这个查分就变成了图像梯度。
1. 垂直边缘提取
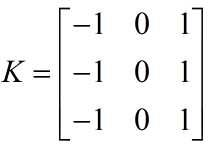
滤波是应用卷积来实现的,卷积的关键就是卷积核。我们来考察下面这个卷积核:
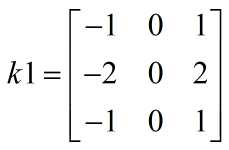
这个核是用来提取图片中的垂直边缘的,怎么做到的呢?看下图:
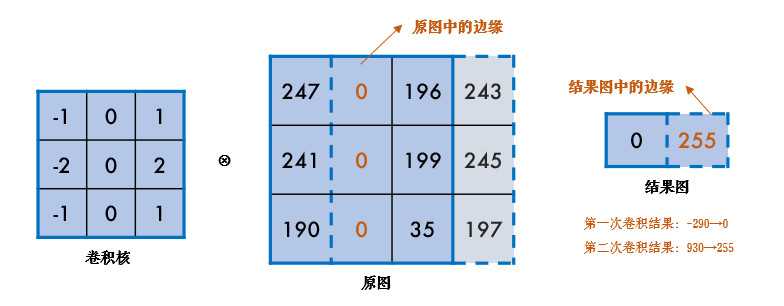
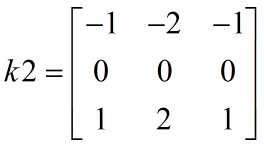
当前列左右两侧的元素进行差分,由于边缘的值明显小于(或大于)周边像素,所以边缘的差分结果会明显不同,这样就提取出垂直边缘。同理,把上面的那个矩阵转置一下,就是提取水平边缘。这种差分操作就成为图像的梯度计算:
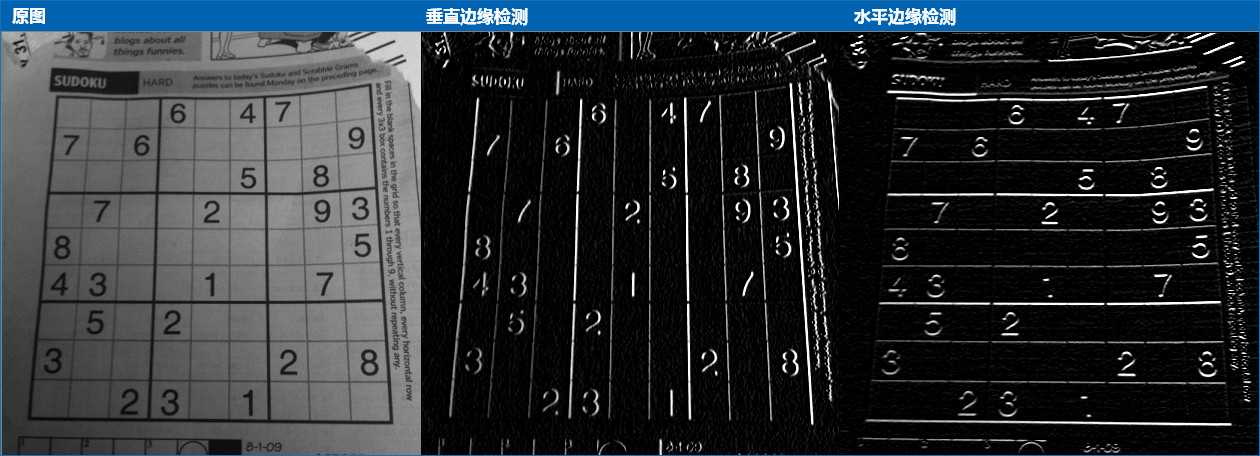
import cv2import numpy as npimg = cv2.imread(‘sudoku.jpg‘, 0)# 自己进行垂直边缘提取kernel = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]], dtype=np.float32)dst_v = cv2.filter2D(img, -1, kernel)# 自己进行水平边缘提取dst_h = cv2.filter2D(img, -1, kernel.T)# 横向并排对比显示cv2.imshow(‘edge‘, np.hstack((img, dst_v, dst_h)))cv2.waitKey(0)
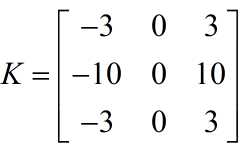
2. Sobel算子
上面这种差分方法就叫Sobel算子,它先在垂直方向上计算梯度 Gx = k1 x src,再在水平方向计算梯度Gy = k2 x src,最后求出总梯度:
我们可以把前面的代码用Sobel算子更简单的实现:
sobelx = cv2.Sobel(img, -1, 1, 0, ksize=3) # 只计算x方向sobely = cv2.Sobel(img, -1, 0, 1, ksize=3) # 只计算y方向# 横向并排对比显示cv2.imshow(‘edge‘, np.hstack((img, sobelx, sobely)))cv2.waitKey(0)
还有其他算子,比如只利用领域间的原始差值来检测边缘的Prewitt算子
还有比Sobel更好用的Scharr算子
 这些算法都是一阶边缘检测的代表。
这些算法都是一阶边缘检测的代表。
3. Laplacian算子
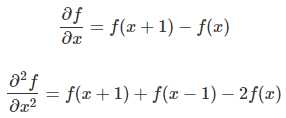
高数中用一阶导数求极值,在这些极值的地方,二阶导数为0,所以也可以求二阶导计算梯度:
一维的一阶和二阶差分公式分别为:
OpenCV-Python-图像梯度与边缘检测
相关内容
- python3简单操作opencv3,,环境:Python版
- IntelliJ 安装 Python 插件,,运行 Intelli
- python并发编程-gevent使用大全,,一、gevent实现
- 【Python】Python库之虚拟现实,,【Python】Py
- 第四篇:python操作数据库时的传参问题,,python在操作数
- 从事自动化测试哪种编程语言更好?当然是python,,编程
- Python和Java该如何选择?选哪个好?,,编程是很多人都想要
- python实现边缘提取,,1. 题目描述安装o
- 用python搭一个超简易的文件服务器,,这个文件服务器纯
- 那些我们不知道的 Python 免费学习资料,,作者:小R编辑
评论关闭